


Section: New Results
Image assimilation
Sequences of images, such as satellite acquisitions, display structures evolving in time. This information is recognized of major interest by forecasters (meteorologists, oceanographers, etc) in order to improve the information provided by numerical models. However, these satellite images are mostly assimilated in geophysical models on a point-wise basis, discarding the space-time coherence visualized by the evolution of structures such as clouds. Assimilating in an optimal way image data is of major interest and this issue should be considered in two ways:
from the model's viewpoint, the problem is to control the location of structures using the observations,
from the image's viewpoint, a model of the dynamics and structures has to be built from the observations.
Divergence-free motion estimation
Participants : Dominique Béréziat [UPMC] , Isabelle Herlin, Sergiy Zhuk [IBM Research, Ireland] .
This research addresses the issue of divergence-free motion estimation on an image sequence, acquired over a given temporal window. Unlike most state-of-the-art technics, which constrain the divergence to be small thanks to Tikhonov regularization terms, a method that imposes a null value of divergence of the estimated motion is defined.
Motion is characterized by its vorticity value and assumed to satisfy the Lagragian constancy hypothesis. An image model is then defined: the state vector includes the vorticity, whose evolution equation is derived from that of motion, and a pseudo-image that is transported by motion. An image assimilation method, based on the 4D-Var technics, is defined and developed that estimates motion as a compromise between the evolution equations of vorticity and pseudo-image and the observed sequence of images.
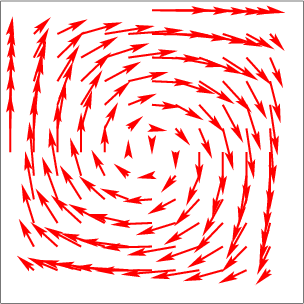
The method is applied on Sea Surface Temperature (SST) images acquired over Black Sea by NOAA-AVHRR sensors. The divergence-free assumption is roughly valid on these acquisitions, due to the small values of vertical velocity at the surface. Fig. 2 displays data and results. As no ground truth of motion is available, the method is quantified by the value of correlation between the pseudo-images and real acquisitions [28] .




Improvement of motion estimation by assessing errors on the dynamics
Participants : Dominique Béréziat [UPMC] , Isabelle Herlin.
Data assimilation technics are used to retrieve motion from image sequences. These methods require a model of the underlying dynamics, displayed by the evolution of image data. In order to quantify the approximation linked to the chosen dynamic model, we consider adding a model error term in the evolution equation of motion and design a weak formulation of 4D-Var data assimilation. The cost function to be minimized simultaneously depends on the initial motion field, at the begining of the studied temporal window, and on the error value at each time step. The result allows to assess the model error and analyze its impact on motion estimation [27] .
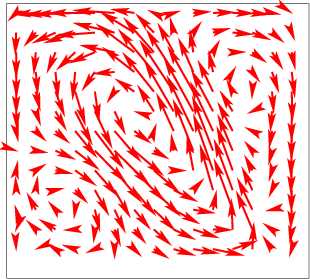
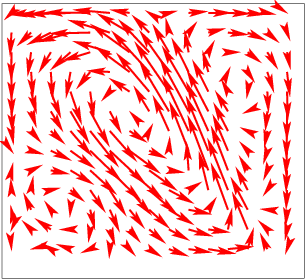
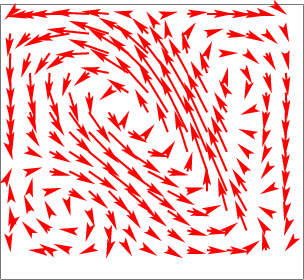
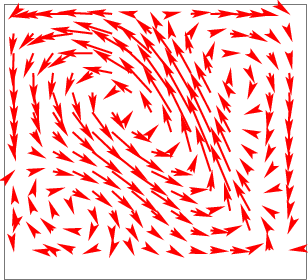
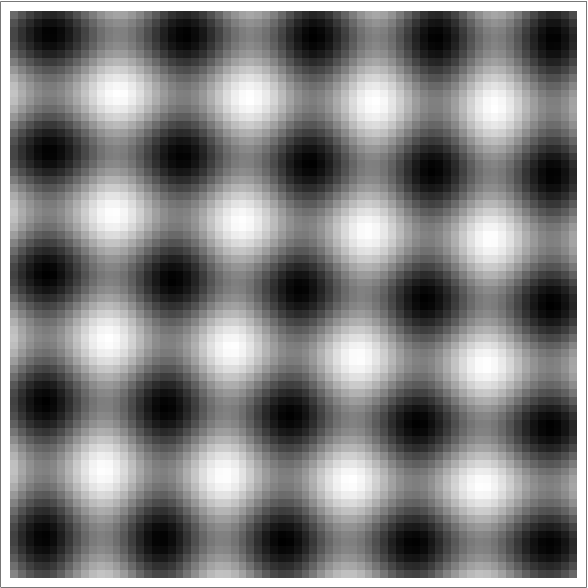
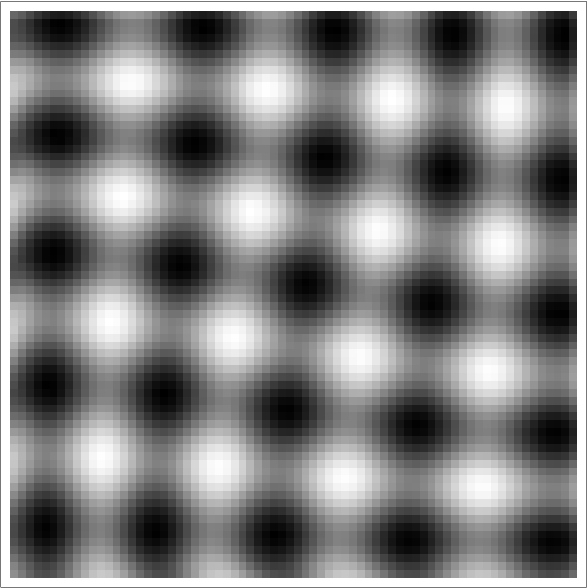
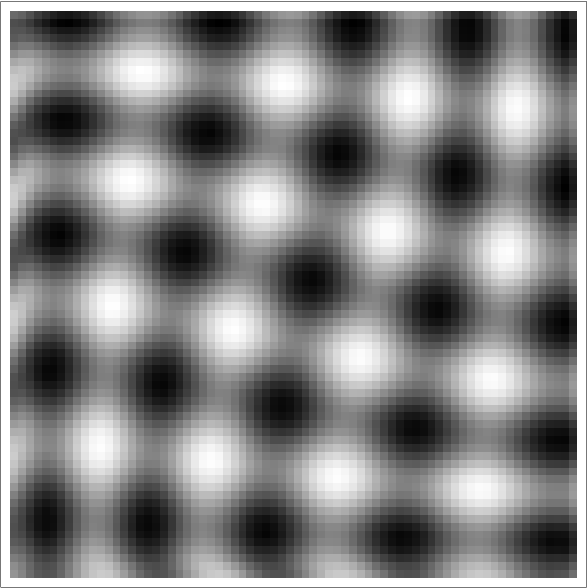
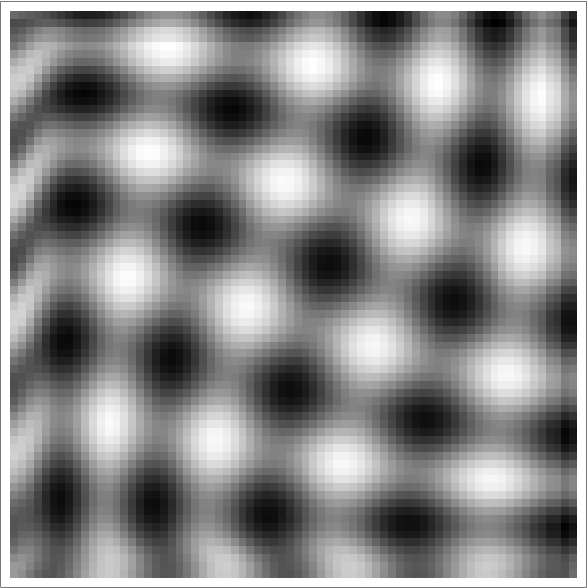
This error assessment method is evaluated and quantified on twin experiments, as no ground truth would be available for real image data. Fig. 3 shows four frames of a series of observations obtained by integrating the evolution model from an initial condition on image and velocity field (the ground truth displayed on the left of Fig. 4 ). An error value is added at each time step on the motion value, when integrating the simulation model. This error is a constant bias.
We performed two data assimilation experiments. The first one considers the evolution model as perfect, with no error in the evolution equation. It is denoted PM (for Perfect Model). The second one, denoted IM (for Imperfect Model) involves an error in the motion evolution equation. In Fig.4 are displayed the motion fields retrieved by PM and IM at the beginning of the temporal window.
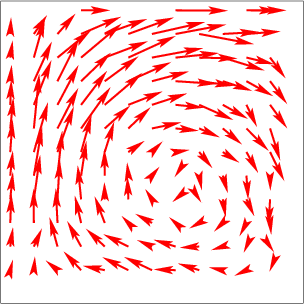
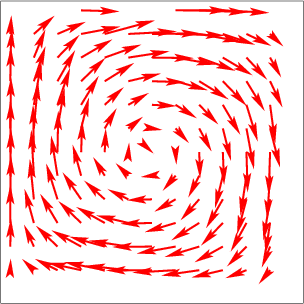
As it can be seen, IM computes a correct velocity field while PM completely fails.
Nonlinear Observation Equation For Motion Estimation
Participants : Dominique Béréziat [UPMC] , Isabelle Herlin.
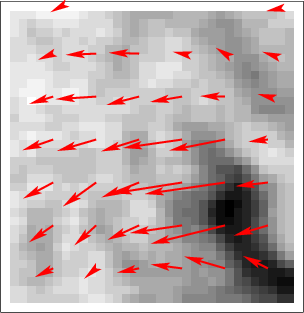
In the image processing literature, the optical flow equation is usually chosen to assess motion from an image sequence. However, it corresponds to an approximation that is no more valid in case of large displacements. We evaluated improvements obtained when using the non linear transport equation of the image brightness by the velocity field [25] . A 4D-Var data assimilation method is designed that simultaneously solves the evolution equation and the observation equation, in its non linear and linearized form. The comparison of results obtained with both observation equations is quantified on synthetic data and discussed on oceanographic Sea Surface Temperature (SST) images. We show that the non linear model outperforms the linear one, which underestimates the motion norm. Fig.5 illustrates this on SST images (motion vectors are displayed by arrows).
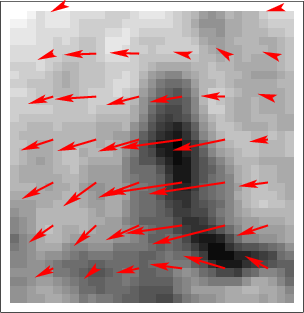
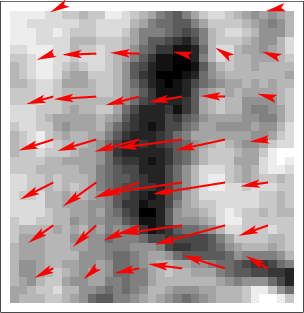
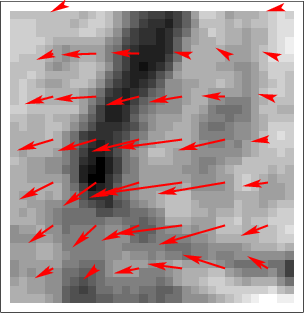
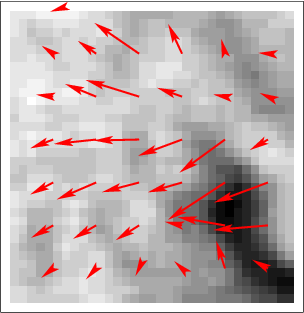
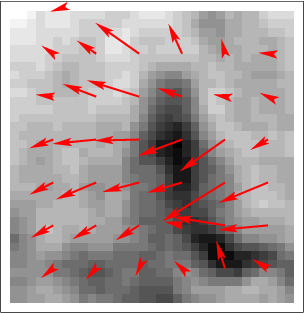
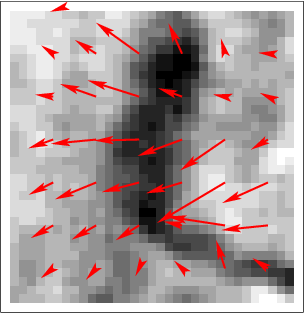
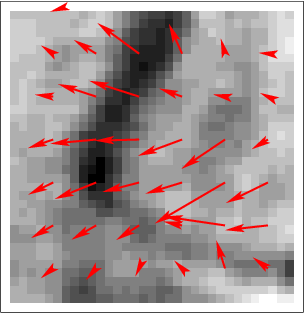
The aim of this research is to achieve a correct estimation of motion when the object displacement is greater than its size. Howerver, in this case, coarse-to-fine incremental methods as well as the non linear data assimilation method fail to retrieve a correct value. The perspective is then to include, in the state vector, a variable describing the trajectory of pixels. The observation operator will then measure the effective displacement of pixels, according to their trajectories, and allow a better estimation of motion value.
Sliding windows method for motion estimation on long temporal image sequences
Participants : Karim Drifi, Isabelle Herlin.
This study concerns the estimation of motion fields from satellite images on long temporal sequences. The huge computational cost and memory required by data assimilation methods on the pixel grid makes impossible to use these techniques on long temporal intervals. For a given dynamic model (named full model), on the pixel grid, the Galerkin projection on subspaces provides a reduced model, that allows image assimilation at low cost. The definition of this reduced model however requires defining an optimal subspace of motion. A sliding windows method is thus designed:
The long image sequence is split into small temporal windows that half overlap in time.
Data assimilation in the full model is applied on the first window to retrieve the motion field.
The estimate of motion field at the beginning of the second window makes it possible to define the subspace for motion and a reduced model is obtained by Galerkin projection.
Data assimilation in the reduced model is applied for this second window.
The process is then iterated for the next window until the end of the whole image sequence.
Experiments were designed to quantify the results of this sliding windows method with base obtained by Principal Orthogonal Decomposition or computed as bi-sine functions [29] .
Tracking of structures from an image sequence
Participants : Yann Lepoittevin, Isabelle Herlin, Dominique Béréziat [UPMC] .
The research concerns an approach to estimate velocity on an image sequence and simultaneously segment and track a given structure. It relies on the underlying dynamics' equations of the studied physical system. A data assimilation method is designed to solve evolution equations of image brightness, those of motion's dynamics, and those of distance map modeling the tracked structures. The method is applied on meteorological satellite data, in order to track tropical clouds on image sequences and estimate their motion.
Part of research was concerned on the numerical schemes applied for advecting the distance map and designing its adjoint.